GetPositionTool¶
This tool provides the position and rotation of a component. To do this, the component is first fixed with a tool. A freely selectable number of CogFindLineTools are then executed relative to this position. The position results from the mean value of the intersection points of the successive lines. The rotation is the mean value of the lines selected for it.
Tab Settings¶
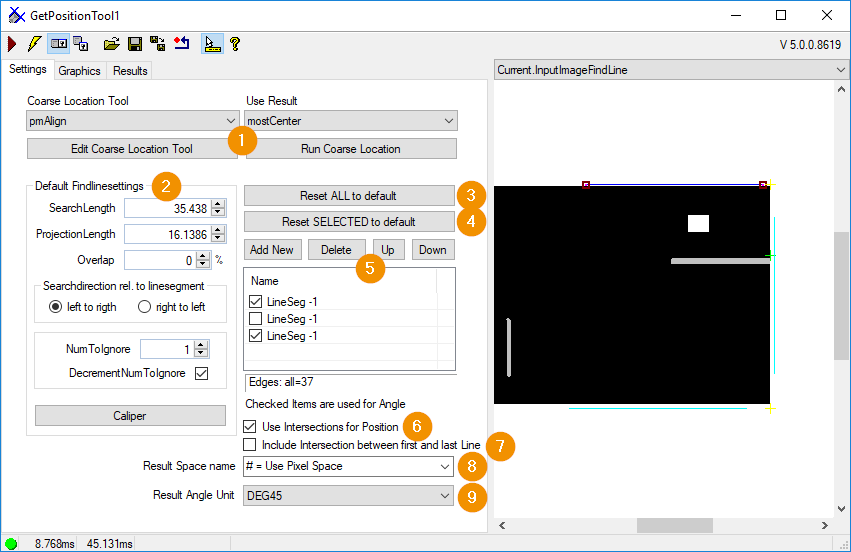
Coarse Location Tool: Settings for coarse search, or fixing the input image. CogPMAlignTool, CogCNLSearchTool and CogBlobTool are available for selection. With Use Result can be set which result of the fixation tool should be used. Optionally, the result with the best score or the result closest to the center of the image can be used. Edit Coarse Location Tool opens the settings dialog for the fixation tool. Run Corse Location Tool runs the fixation tool.
Default Findlinesettings: The default values for the CogFindLineTools can be set here. For a detailed description, see VisionPro (R) Online documentation.
Reset ALL to default: Resets all CogFindLineTools to the default values.
Reset SELECTED to default: Resets the selected CogFindLineTool to the default values.
List of CogFindLineTools: Double-click on an element to open the dialog of the associated CogFindLineTool. The rotation is the mean value of the lines selected by check marks. If no line is selected, the angle of the Coarse Location Tool is returned.
Add New: Adds a new element to the CogFindLineTool list.
Delete: Deletes the selected item from the CogFindLineTool list.
Up:Moves the selected element of the CogFindLineTool list up.
Down:Moves the selected element of the CogFindLineTool list down.
Use Intersection for Position: If selected, the position is the average of the intersections of the successive lines. If not selected, the position of the Coarse Location Tool is returned.
Include Intersection between first and last Line: Specifies whether the intersection between the first and last line should be included for the position determination.
Result Space name: Name of the coordinate system in which the results are returned. All coordinate systems of the input image can be selected.
Result Angle Unit: Unit of rotation. RAD, DEG and DEG45 can be selected. DEG45 is an angle adjusted to 45 DEG.
Tab Graphics¶
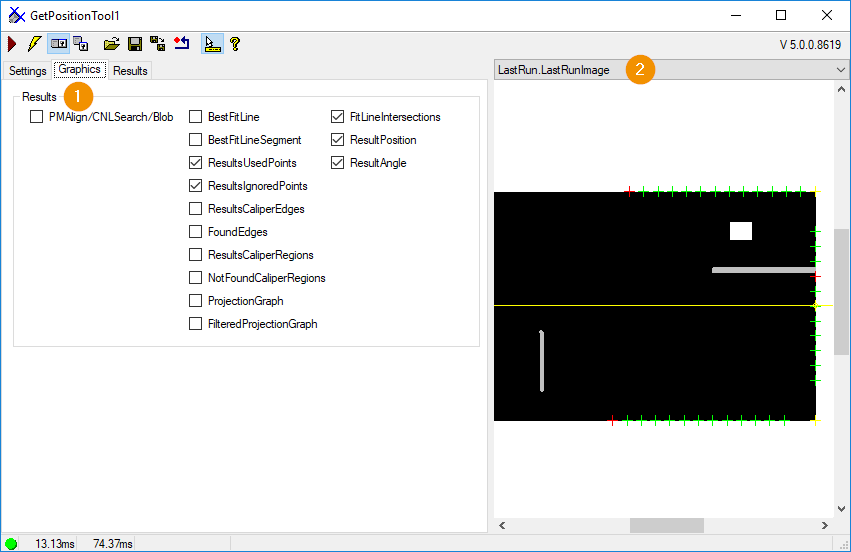
Results: Selection of which graphics are to be generated.
LastRun.LastRunImage: This displays the last input image with the selected graphics.
Tab Results¶
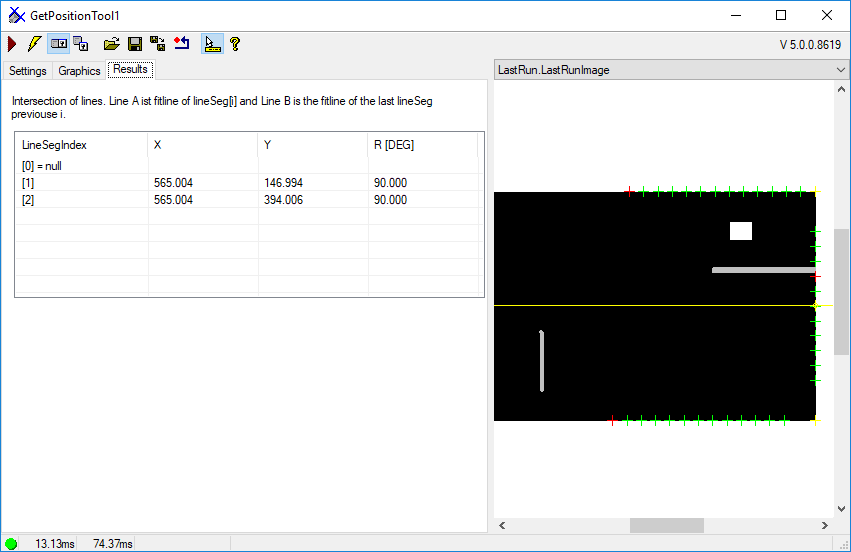
LineSegs: List of intersection points of consecutive lines. If the intersection between the first and the last line is not determined, the first result is empty (zero).