Calibration/Fixing Tools in Cognex VisionPro¶
Basically, VisionPro distinguishes between “calibration” and “fixation”. When a calibration is applied to an image, a new, rectified output image is calculated. In this way, for example, radial distortions caused by the optics can be corrected in the CogCalibCheckerboardTool.
With a fixation, on the other hand, “only” a new coordinate space is appended to the coordinate tree of the image. Fixations are therefore suitable e.g. for the conversion of pixel coordinates into world or robot coordinates.
In Viper.NET, Global calibrations supports all tools except the CogImageCorrectorTool.
This chapter provides a brief overview of the available tools. Further information can be found in the Cognex VisionPro documentation.
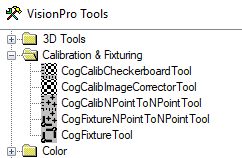
CogCalibCheckerboardTool¶
The CalibCheckerboardTool offers among other things the possibility to perform an intrinsic camera calibration. By measuring a checkerboard pattern (different variants), the distortion of the camera system is calculated and can thus be compensated. This tool should be used when using endocentric optics and for position transfer to robots or axis systems.
For this purpose, a checkerboard pattern should be taken at the appropriate working distance and the calibration calculated in the tool menu.
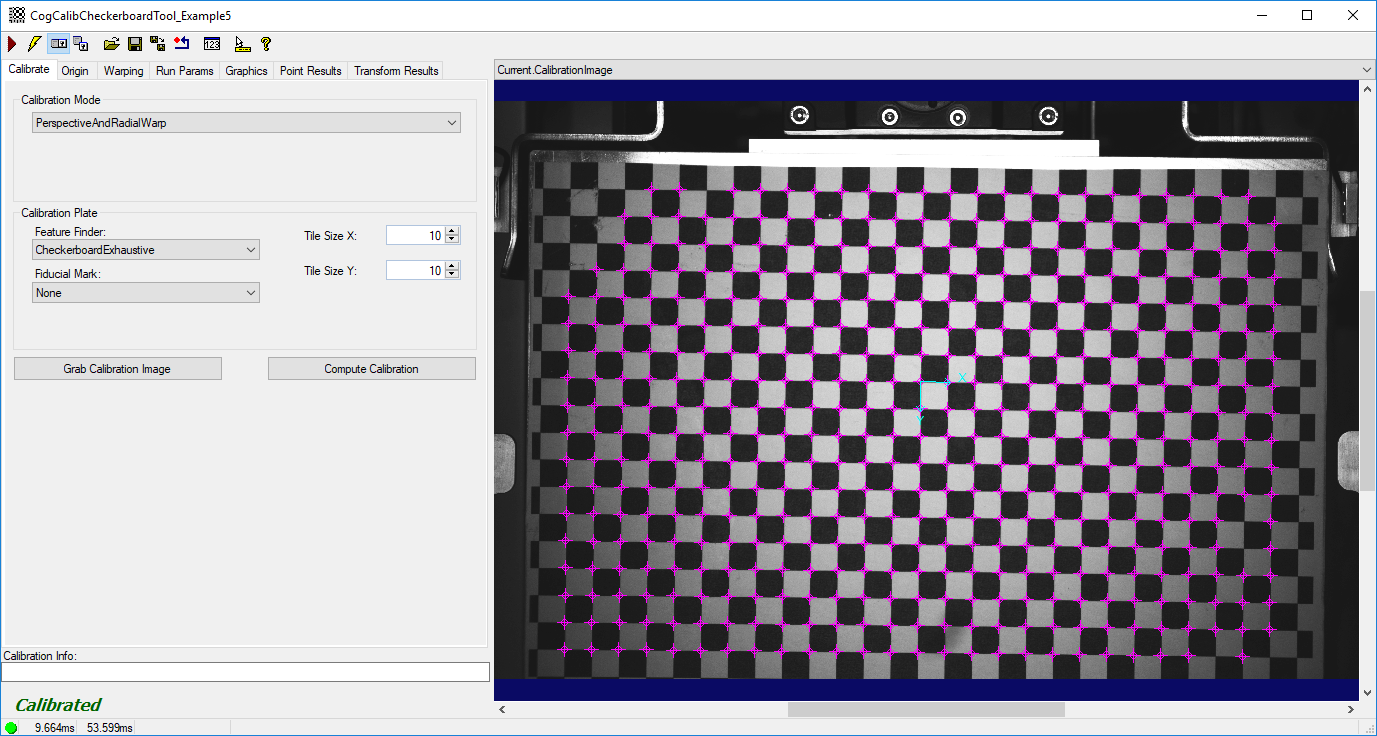
Distortions are calculated and the rectified image is then “straightened”. Additional image data (marked in red here) may be added at the edge of the image.
CogCalibImageCorrectorTool¶
Tool is outdated: Use of CheckboardTool recommended!
CogCalibNPointToNPointTool¶
The tool calculates a 2D transformation from image coordinates (pixels) to world coordinates (mm,µm). For example, it is possible to take over a reference coordinate system (robot, axis system) and calculate results directly in these coordinates.
In the following example, a calibration plate was used. In the image processing algorithm, the points of the reference markers must be detected and then transferred and calculated with the coordinates of the reference coordinate system (robot in this case). The camera and robot coordinate systems are both visible in the image.
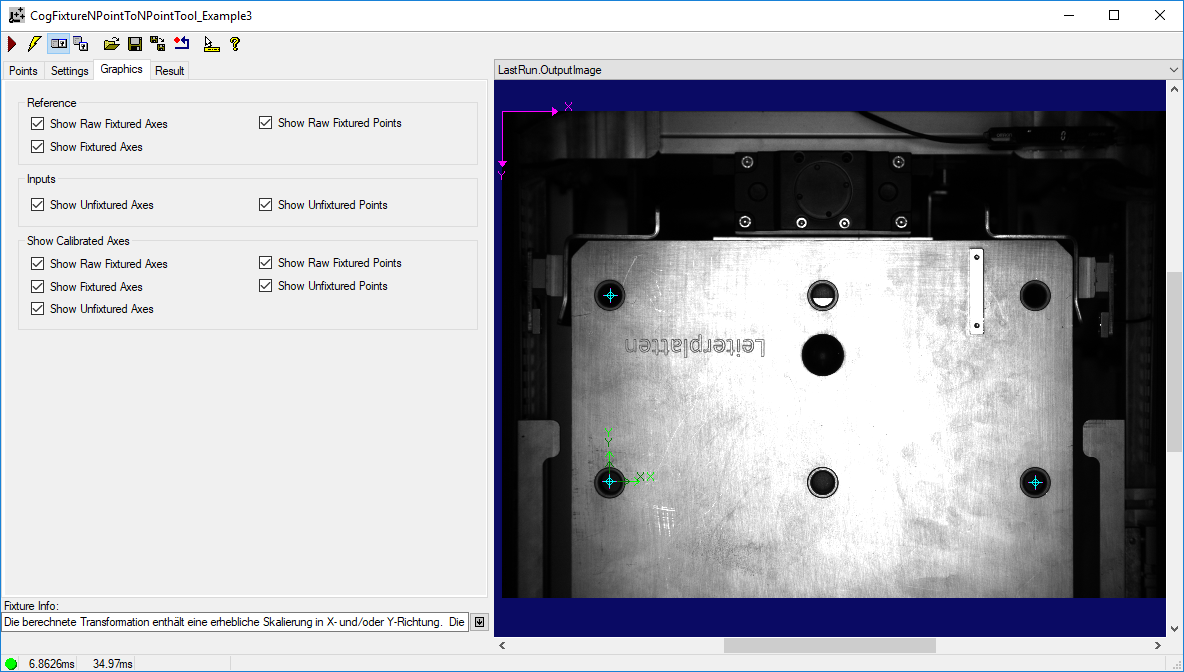
CogFixtureNPointToNPointTool¶
This tool is used in a similar way as the CalibNPointToNPointTool. In contrast, it is not intended to perform a calibration with a reference system. The FixtureNPointToNPointTool is rather used to create a new coordinate space to simplify calculations in the image processing algorithm.
CogFixtureTool¶
Probably the most commonly used CogFixtureTool is used to create new coordinate spaces in the image processing algorithm. For example, a coordinate system can be set at the zero point of a component determined via CogPMAlign, which serves to simplify further calculations.